平衡摩托总结
这是对代码逻辑的简要总结,详细的代码位于https://github.com/baikal2411/SMC/
详细的外设要求信息见第十九届智能车摩托组外设清单。

CPU资源安排
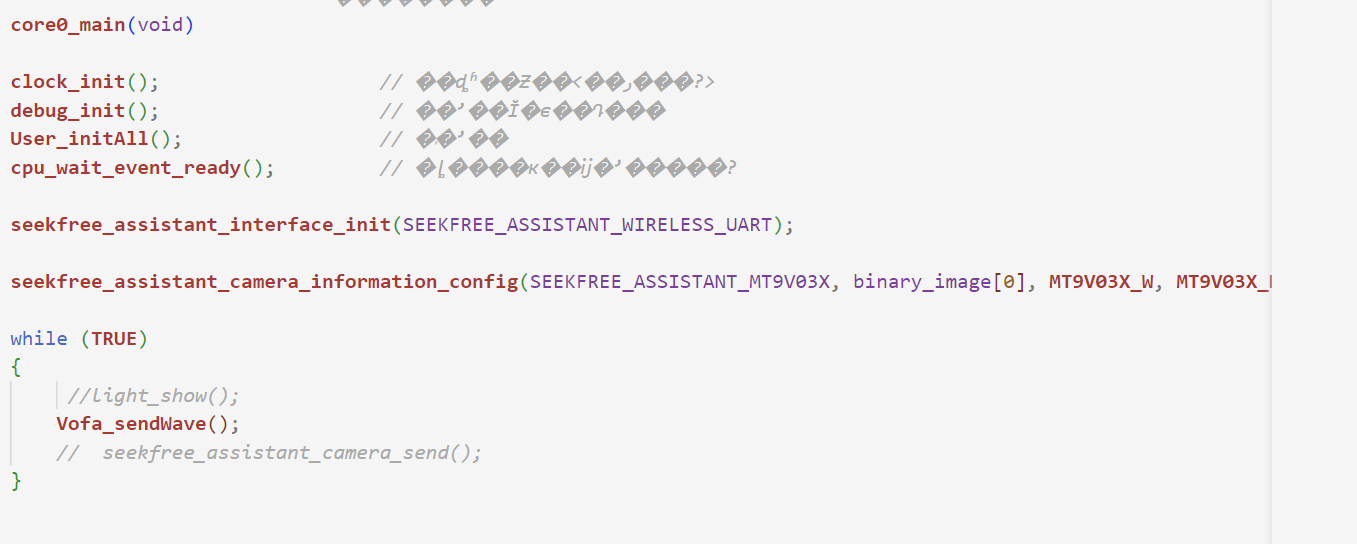
对于cpu0而言:需要等待 CPU1 核心完成初始化或某些事件准备就绪,确保多核协作的同步。
seekfree_assistant_interface_init(SEEKFREE_ASSISTANT_WIRELESS_UART):初始化无线串口助手接口。
seekfree_assistant_camera_information_config(...):配置摄像头助手的信息,包括摄像头类型、图像数据缓冲区及分辨率。
通过 VOFA 工具发送波形数据,用于调试或监控。
对于cpu1而言:直接运行图像识别。
中断设置
PIT 定时器中断
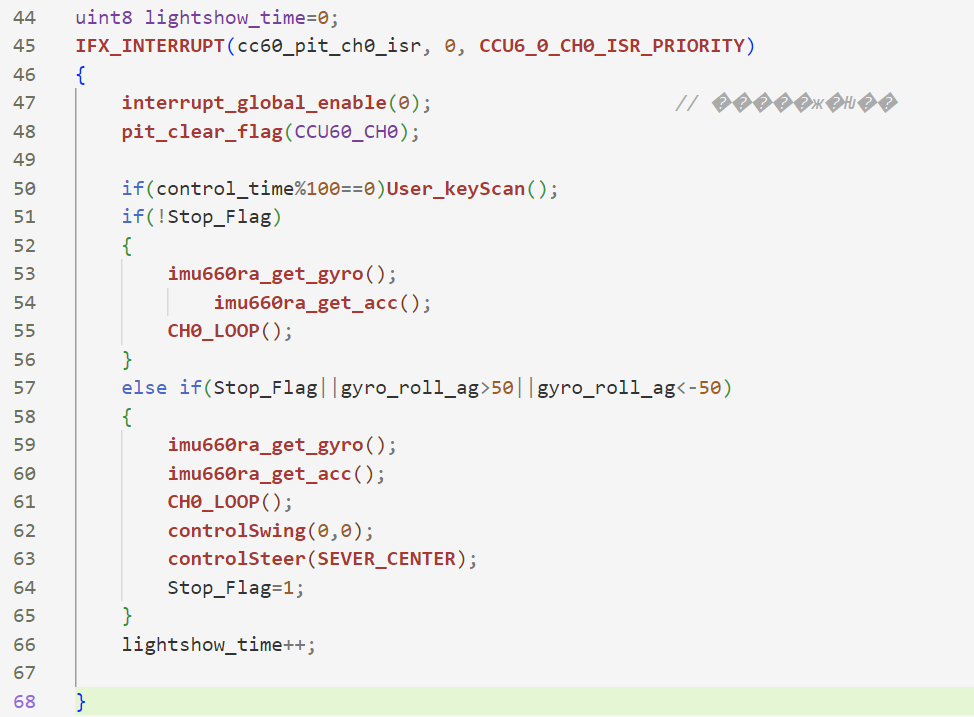
cc60_pit_ch0_isr 和 cc60_pit_ch1_isr
处理定时器中断,清除中断标志。在cc60_pit_ch0_isr中:
扫描按键(
User_keyScan())。获取陀螺仪和加速度计数据(
imu660ra_get_gyro()和imu660ra_get_acc())。调用控制逻辑(
CH0_LOOP())。如果检测到停止标志或陀螺仪角度异常,则停止运动并复位控制。
在
cc60_pit_ch1_isr中:清除中断标志.
外部中断
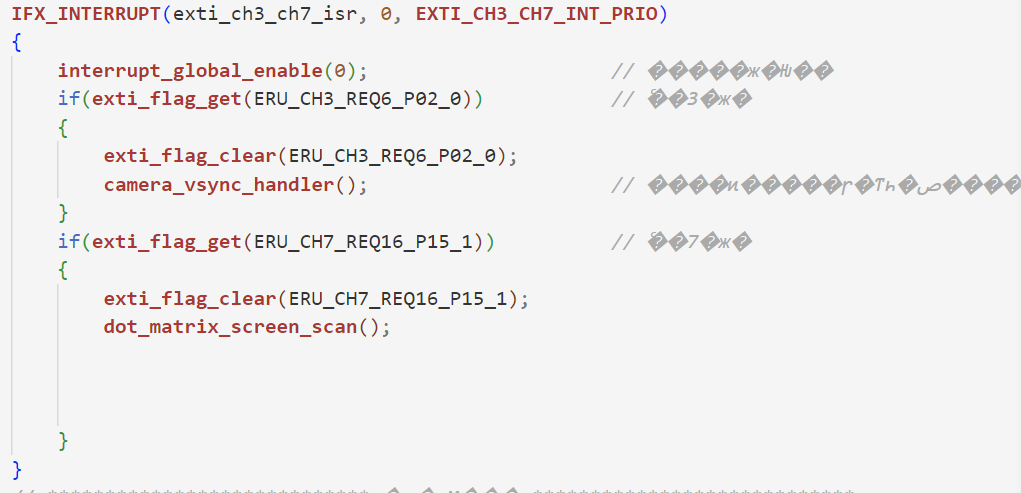
exti_ch0_ch4_isr 到
exti_ch3_ch7_isr:处理外部引脚中断,清除中断标志。
例如:在 exti_ch3_ch7_isr
中,处理摄像头的垂直同步信号(camera_vsync_handler())和点阵屏扫描(dot_matrix_screen_scan())。在
exti_ch1_ch5_isr 中,处理 ToF
模块的中断(tof_module_exti_handler())
DMA中断
dma_ch5_isr处理 DMA 传输完成中断。并且调用摄像头 DMA
数据处理函数(camera_dma_handler())。
UART中断
发送和接收中断
例如:
uart0_rx_isr:处理 UART0 的接收中断,调用调试或数据处理函数(如debug_interrupr_handler())。uart1_rx_isr:处理摄像头 UART 数据接收(camera_uart_handler())和 TLD7002 回调。uart2_rx_isr:处理无线模块 UART 数据接收(wireless_module_uart_handler())。uart3_rx_isr:处理 GNSS 模块的 UART 数据接收(gnss_uart_callback())。
错误中断
- 例如:
uart0_er_isr到uart3_er_isr:处理 UART 错误中断,调用错误处理函数(如IfxAsclin_Asc_isrError())。
- 例如:
在每个中断服务程序中,使用 interrupt_global_enable(0)
来启用全局中断,避免中断嵌套问题。
控制逻辑
位于文件control_strategy当中
1. 偏差计算
computeDevation函数- 通过图像处理结果(如中线、左线和右线的位置),计算车辆相对于路径的偏差。
- 根据路径的曲率(
curvity)判断轨迹是左偏、右偏还是直线。 - 计算偏差值(
devation和part_devation),并根据车辆位置(如是否丢线)进行修正。 - 输出偏差值,用于后续的方向控制。
2. 路径规划
- 根据图像中线和左右边界线的位置,规划车辆的前视路径(
foresight_str和foresight_end)。 - 判断路径的偏移方向(左偏或右偏),并调整偏差值以适应不同的道路情况。
3. 速度控制
getTargetSpeed函数- 根据当前偏差值(
current_devation),动态调整目标速度(target_speed)。 - 偏差较小时,允许更高的速度;偏差较大时,降低速度以提高安全性。
- 根据当前偏差值(
4. 姿态控制
CH0_LOOP函数- 周期性更新车辆的姿态和运动参数:
- 每 1ms 更新一次 Roll 角速度控制。
- 每 5ms 更新一次 Roll 角度控制。
- 每 50ms 更新一次 Yaw 角速度和方向控制。
- 每 100ms 更新一次速度控制。
- 使用 PID 控制器(如
ROLL_AV_PID、ROLL_AG_PID和YAW_AV_PID)对车辆的姿态和速度进行精确控制。 - 调用
controlSteer和controlSwing函数调整舵机和电机的输出。
- 周期性更新车辆的姿态和运动参数:
5. 偏差调整
Devation_Adjust函数- 根据不同的场景(如左环岛、右环岛等),对偏差值进行限制和修正。
- 确保车辆在特殊场景下能够保持稳定的轨迹。
下面给出中断的控制函数:
1 | void CH0_LOOP(void) |
其中最重要的就是串级PID的使用了,
(1) 外环:速度控制
- 输入:目标速度(
target_speed)与当前速度(current_speed)的误差。 - 输出:加速度控制目标(
speed_out),作为内环的输入。
(2) 内环:加速度控制
- 输入:目标加速度(
target_accel)与当前加速度(gyro_roll_ac)的误差。 - 输出:电机的PWM补偿(
accel_out)。
(3) 方向控制
- 输入:偏差(
devation)与目标偏差(通常为0)的误差。 - 输出:舵机的控制信号(
turn_out)。
(4) 姿态控制
- 输入:目标Roll角速度(
roll_ag_out)与当前Roll角速度(gyro_roll_av)的误差。 - 输出:电机的PWM信号(
Tduty)。
(1) 速度控制
目标:根据当前速度和目标速度,调整车辆的加速度和电机输出。
实现
1
2
3
4
5
6
7Encoder_getData();
current_speed = -SPEED_INDEX * (encoder_left + encoder_right);
getTargetSpeed();
speed_out = positionalPID(&SPEED_PID, speed_pid, current_speed, target_speed);Encoder_getData()获取当前速度。getTargetSpeed()根据偏差计算目标速度。positionalPID使用速度 PID 控制器计算速度误差,输出speed_out。
(2) 加速度控制
目标:根据目标加速度和当前加速度,调整车辆的动力输出。
实现
1
2
3
4
5
6
7if (gyro_pitch_ag > 10)
accel_out = **incrementalPID**(&ACCEL_PID, accel_pid, gyro_roll_ac, (target_accel + PITCH_INDEX * **sinf**(gyro_pitch_ag * 0.01745f)));
else
accel_out = 0;- 使用增量式 PID
控制器(
incrementalPID)计算加速度误差,输出accel_out。 - 当车辆的 Pitch 角度较大时,考虑重力影响进行补偿。
- 使用增量式 PID
控制器(
(3) 方向控制
目标:根据偏差调整车辆的方向。
实现
1
2
3
4
5turn_out = positionalPID(&TURN_PID, turn_pid, devation, 0);
turn_out = protectRange(turn_out, -80, +80);
controlSteer(SEVER_CENTER + turn_out);- 使用方向 PID 控制器(
TURN_PID)计算偏差误差,输出turn_out。 - 调用
controlSteer调整舵机角度。
- 使用方向 PID 控制器(
(4) Roll 角度控制
目标:通过 Roll 角度 PID 控制器调整车辆的平衡。
实现
1
roll_ag_out = **positionalPID**(&ROLL_AG_PID, roll_ag_pid, gyro_roll_ag, -yaw_av_out - bend_out);
- 使用 Roll 角度 PID 控制器(
ROLL_AG_PID)计算 Roll 角度误差,输出roll_ag_out。 - 结合 Yaw 角速度和弯道补偿(
bend_out)进行调整。
- 使用 Roll 角度 PID 控制器(
(5) Roll 角速度控制
目标:通过 Roll 角速度 PID 控制器调整电机输出。
实现
1
Tduty = incrementalPID(&ROLL_AV_PID, roll_av_pid, gyro_roll_av, roll_ag_out + dynamic_zero);
- 使用 Roll 角速度 PID 控制器(
ROLL_AV_PID)计算 Roll 角速度误差,输出电机占空比Tduty。
- 使用 Roll 角速度 PID 控制器(
图像的预处理
image_process.c 文件的主要作用是对摄像头采集的图像数据进行预处理和特征提取,为后续的路径规划和车辆控制提供基础数据。它包含了图像的二值化、边界检测、噪声过滤以及中线计算等功能。
1. 图像预处理
- Sobel 算子 (
image_sobel):- 使用 Sobel 算子计算图像的梯度,提取边缘信息。
- 根据梯度值和局部平均值进行二值化处理,生成二值图像。
- 输出结果存储在
binary_image中,用于后续处理。
- 自适应阈值 (
adaptiveThreshold):- 根据局部区域的平均值动态计算阈值,对图像进行二值化。
- 适用于光照变化较大的场景。
2. 边界检测
- 左手法和右手法 (
findline_lefthand_adaptive和findline_righthand_adaptive):- 使用迷宫搜索算法,从种子点开始沿左侧或右侧边界搜索。
- 搜索结果存储在
b_left和b_right中,分别表示左边界和右边界的点集。
- 边界转换:
- 将
b_left和b_right中的点集转换为每一行的边界值,存储在left_line和right_line中。
- 将
3. 中线计算
- 中线计算 (
maze_image_predeal):- 根据左右边界线计算每一行的中线位置,存储在
mid_line中。 - 中线用于后续的路径规划和偏差计算。
- 根据左右边界线计算每一行的中线位置,存储在
4. 噪声过滤
- 二值图像过滤 (
Bin_Image_Filter):- 对二值图像进行噪声过滤,移除孤立点或小面积噪声。
- 根据周围像素的值判断当前像素是否需要保留。
- 中值滤波 (
medianFilter):- 使用中值滤波器平滑图像,减少噪声对边界检测的影响。
5. 边界处理
- 边界绘制 (
image_draw_rectan):- 在图像的边界区域绘制黑色矩形,避免边界噪声影响处理结果。
6. 图像预处理流程
- 迷宫图像预处理 (
maze_image_predeal):- 调用
image_draw_rectan绘制边界。 - 使用
GetSeed提取种子点。 - 调用
findline_lefthand_adaptive和findline_righthand_adaptive搜索左右边界。 - 将边界点集转换为每一行的边界值,并计算中线。
- 调用
预处理的流程:
- 图像预处理:
- 对摄像头采集的原始图像进行梯度计算、二值化和噪声过滤,生成清晰的二值图像。
- 边界检测:
- 使用迷宫搜索算法提取道路的左右边界线。
- 中线计算:
- 根据左右边界线计算道路的中线,为路径规划和车辆控制提供参考。
- 噪声处理:
- 通过滤波算法移除图像中的噪声,增强边界检测的鲁棒性。
- 数据输出:
- 输出左右边界线和中线的坐标数据,供后续模块使用。
图像边界的提取
image_tool.c 文件主要实现了图像处理相关的功能,核心目的是从图像数据中提取道路信息(如中线、左右边界线、拐点等),并为路径规划和车辆控制提供支持。以下是文件的主要功能和实现的详细解释:
- 文件的主要功能
- 迷宫算法:通过迷宫搜索算法提取道路的左右边界线或拐点。
- 拐点检测:根据梯度变化或坐标变化检测道路的拐点。
- 线段拟合:通过拟合算法判断道路是否为直线。
- 丢线处理:在丢失边界线时,通过补线算法恢复道路信息。
- 辅助判断:提供道路类型(如环岛、障碍物)的辅助判断功能。
2. 核心函数解析
(1) maze_find_inflection
- 功能:使用迷宫算法从起始点开始,沿左侧或右侧边界搜索拐点。
- 输入参数:
choose:选择搜索方向('L' 表示左侧,'R' 表示右侧)。StartPoint:起始点坐标。endline:搜索的最小行索引。num:最大搜索点数。Qiedian:输出的拐点坐标。thre:梯度变化的阈值。
- 实现逻辑:
- 使用迷宫搜索算法,沿着图像的二值化边界线进行遍历。
- 通过梯度变化(
cal_gradient_Point)检测拐点。 - 如果找到满足条件的拐点,则将其坐标存储到
Qiedian中。
(2) FillingLine
- 功能:在丢失边界线时,通过起点和终点之间的直线补全边界线。
- 输入参数:
Choose:选择补全的边界线('L' 表示左边界,'R' 表示右边界)。StarPoint和EndPoint:起点和终点坐标。
- 实现逻辑:
- 根据起点和终点计算直线的斜率和截距。
- 遍历起点到终点之间的行,计算每一行的边界线坐标并填充。
(3) GetSeed
- 功能:从图像中提取种子点,用于后续的边界线搜索。
- 实现逻辑:
- 在图像的某一行(如第 118 行)中,检测黑白跳变点。
- 根据跳变点的位置,提取左右边界的种子点。
(4) getValidMidRow
- 功能:计算有效的中线行索引,用于判断道路的有效区域。
- 实现逻辑:
- 从图像底部向上遍历,检测中线是否有效。
- 使用滑动窗口对中线行索引进行平滑处理。
(5) cal_gradient_Point
- 功能:计算两点之间的梯度(斜率)。
- 实现逻辑:
- 根据两点的坐标计算斜率。
- 如果两点的 X 坐标相同,则返回一个极大值(表示垂直线)。
(6) find_straight
- 功能:判断一段边界线是否为直线。
- 实现逻辑:
- 使用最小二乘法拟合直线,计算直线的斜率和截距。
- 根据直线与实际点的偏差,判断是否为直线。
(7) EvaluateCircleBoundary
- 功能:判断当前道路是否为环岛。
- 实现逻辑:
- 根据左右边界线的变化(如跳变、间距)判断是否为环岛。
- 如果满足环岛条件,则返回
true。
(8) EvaluateBarrierBoundary
- 功能:判断当前道路是否存在障碍物。
- 实现逻辑:
- 检测左右边界线的跳变幅度。
- 如果跳变幅度超过阈值,则认为存在障碍物。
(9) UpInflection_Handle_Test
- 功能:在丢失边界线时,向上搜索拐点并补全边界线。
- 实现逻辑:
- 从起始点向上搜索黑白跳变点。
- 使用迷宫算法找到拐点,并通过
FillingLine补全边界线。
3. 文件的整体作用
- 图像处理:从二值化图像中提取道路的左右边界线和中线。
- 路径规划:通过拐点检测和直线拟合,为路径规划提供支持。
- 丢线处理:在边界线丢失时,通过补线算法恢复道路信息。
- 辅助判断:提供环岛、障碍物等特殊道路场景的判断功能。
image_tool.c 文件是图像处理模块的核心部分,主要通过迷宫搜索、梯度计算和拟合算法提取道路信息,并为车辆的路径规划和控制提供基础数据。它在整个系统中起到了桥梁作用,将图像数据转化为可用于控制的道路信息。
元素识别处理
camera.c 文件的主要功能是处理摄像头采集的图像数据,进行图像预处理、道路特征提取、道路类型识别以及特定道路元素的处理。以下是文件的内容梳理:
1. 文件的主要功能
- 图像采集与预处理:从摄像头获取原始图像数据,并进行二值化、边界增强等处理。
- 道路特征提取:提取左右边界线、中线以及其他道路特征。
- 道路类型识别:识别直道、弯道、环岛、十字路口、障碍物等道路类型。
- 道路元素处理:根据识别的道路类型,执行相应的处理逻辑。
- 调试与显示:通过点阵屏或显示屏输出调试信息和图像。
2. 文件的主要模块
(1) 全局变量
- 图像数据:
temp_Image:存储摄像头采集的原始图像。binary_image和black_white_Image:存储二值化后的图像。
- 道路特征:
left_line、right_line、mid_line:分别表示左右边界线和中线的坐标。
- 状态标志:
straight_flag、bend_flag、S_bend_flag等:标志当前道路类型。Stop_Flag:标志是否需要停车。
- 道路类型结构体:
Road_Type_Test:包含各种道路类型的标志(如十字路口、环岛、障碍物等)。
(2) 图像预处理
Camera_Display_Test:- 核心函数,用于处理摄像头采集的图像。
- 主要步骤:
- 调用
Copy_Origin_Image_Test复制原始图像。 - 调用
Local_Dajin进行二值化处理。 - 调用
image_sobel提取边缘信息。 - 调用
Bin_Image_Filter和black_white_Image_Filter进行噪声过滤。 - 调用
image_draw_rectan增强边界条件。 - 调用
maze_image_predeal提取左右边界线和中线。 - 调用
getValidMidRow计算有效中线行。 - 判断道路类型(直道或弯道),并计算偏差值。
- 调用
(3) 道路类型识别
Element_Ack_usingCNT:- 根据当前道路状态,识别特定的道路类型(如十字路口、环岛、障碍物等)。
- 主要逻辑:
- 调用
Clarify_Cross、Clarify_Left_Circle、Clarify_Right_Circle等函数,判断是否为特定道路类型。 - 更新
Road_Type_Test中的标志位。
- 调用
Element_Ack_Test:- 类似于
Element_Ack_usingCNT,但不依赖process_count,直接检测道路类型。
- 类似于
(4) 道路元素处理
Element_Handle_Test:- 根据识别的道路类型,调用相应的处理函数。
- 主要处理函数:
Handle_Left_CircleIsland_Test和Handle_Right_CircleIsland_Test:处理左环岛和右环岛。Handle_Normal_Cross_Test:处理十字路口。Handle_Left_Barrier_Test和Handle_Right_Barrier_Test:处理左侧和右侧障碍物。Handle_Stop_Test:处理停车标志。Handle_S_Bend:处理 S 型弯道。
(5) 道路类型识别与处理的辅助函数
- 十字路口:
Clarify_Cross:判断是否为十字路口。Handle_Normal_Cross_Test:处理十字路口的逻辑。FixCross_Midline:修正十字路口的中线。CrossExitAssistant:辅助判断是否离开十字路口。
- 环岛:
Clarify_Left_Circle和Clarify_Right_Circle:判断是否为左环岛或右环岛。Handle_Left_CircleIsland_Test和Handle_Right_CircleIsland_Test:处理环岛的逻辑。
- 障碍物:
Clarify_Left_Barrier和Clarify_Right_Barrier:判断是否存在左侧或右侧障碍物。Handle_Left_Barrier_Test和Handle_Right_Barrier_Test:处理障碍物的逻辑。
- 停车:
Clarify_Stop_Test:判断是否需要停车。Handle_Stop_Test:处理停车逻辑。
- S 型弯道:
Clarify_S_Bend:判断是否为 S 型弯道。Handle_S_Bend:处理 S 型弯道的逻辑。
(6) 图像二值化
Local_Dajin:- 使用 Otsu 算法对图像进行二值化。
- 分别对图像的上半部分和下半部分计算阈值,并进行二值化处理。
GetHistGram和otsu2dTh:- 计算图像的直方图,并使用 Otsu 算法计算二值化阈值。
binaryzation:- 根据阈值对图像进行二值化。
(7) 调试与显示
light_show:- 根据当前道路状态,通过点阵屏显示调试信息。
- 显示内容包括十字路口、环岛、障碍物等状态。
ips200_displayimage03x:- 在显示屏上显示二值化图像。
ips200_show_string和ips200_show_int:- 显示调试字符串和数值。
3. 文件的整体作用
- 图像处理:
- 从摄像头获取原始图像,并进行二值化、边界增强和特征提取。
- 道路识别:
- 识别直道、弯道、十字路口、环岛、障碍物等道路类型。
- 道路处理:
- 根据识别的道路类型,执行相应的处理逻辑。
- 调试与显示:
- 输出调试信息和图像,便于开发和调试。
我们以右环岛为例说明识别逻辑:
右环岛的识别通过函数 Clarify_Right_Circle()
实现,其核心逻辑是基于图像特征(如边界线、梯度变化、黑白区域分布等)判断当前道路是否为右环岛。
识别步骤
- 边界条件检查:
- 调用
EvaluateCircleBoundary('R', ...)检查右边界是否满足环岛的基本条件(如边界线的连续性和形状)。 - 如果不满足条件,直接返回
false。
- 调用
- 寻找右边界拐点:
- 使用迷宫搜索算法
maze_find_inflection_bythre('R', ...)从图像中寻找右边界的拐点(right_down)。 - 如果拐点位置不合理(如超出图像范围或过于靠近底部),返回
false。
- 使用迷宫搜索算法
- 统计黑白区域分布:
- 在右边界拐点附近统计黑白区域的分布情况,判断是否符合右环岛的特征。
- 如果黑白区域的分布不符合预期,返回
false。
- 计算边界长度:
- 通过遍历右边界线,计算第一段和第二段的长度(
firstlen和seclen)。 - 如果两段长度符合右环岛的特征(如第一段较长,第二段较短),返回
true,否则返回false。
- 通过遍历右边界线,计算第一段和第二段的长度(
右环岛的处理通过函数 Handle_Right_CircleIsland_Test()
实现,其核心逻辑是基于状态机逐步完成右环岛的处理。
处理步骤
状态机初始化:
- 使用变量
RightCircleIsland_Stage_Test表示右环岛的当前处理阶段。 - 每个阶段对应不同的处理逻辑。
- 使用变量
各阶段处理逻辑:
阶段 0
:检测右边界的丢失行数和丢失点数,寻找右边界的拐点,并补全右边界线。
- 如果丢失点数超过阈值且时间满足条件,进入下一阶段。
阶段 1
:继续寻找右边界的拐点,并补全右边界线。
- 如果丢失点数小于阈值且时间满足条件,进入下一阶段。
阶段 2
:检测右边界的上方拐点,并补全右边界线。
- 如果满足条件(如拐点位置合理),进入下一阶段。
阶段 3
:处理右边界的特殊情况(如大面积丢失),并补全右边界线。
- 如果满足条件(如时间或边界特征),进入下一阶段。
阶段 4
:检测右边界的最终拐点,并补全右边界线。
- 如果满足条件,进入下一阶段。
阶段 5:完成右环岛的处理,清除右环岛标志位。
状态机结束:
- 当状态机进入最终阶段(阶段 5),清除右环岛标志位,并记录右环岛处理完成的次数。